





Copyright © 2026 Samshad Nc. All rights reserved.
Hi, I'm Samshad!
Robotics ResearcherEngineerDeveloper
Researcher with 8+ years of experience, currently at NUS Singapore, exploring how machines see and understand the world.

- Nice to meet you!
SAMSHAD NC
RESEARCHER | ENGINEER | EXPLORERCoderPlayerHello! I'm Mohamed Samshad, a Robotics Researcher at the National University of Singapore. I work on Computer Vision, Visual SLAM, and 3D Scene Understanding - exploring how machines can perceive, map, and reason about the world around them.
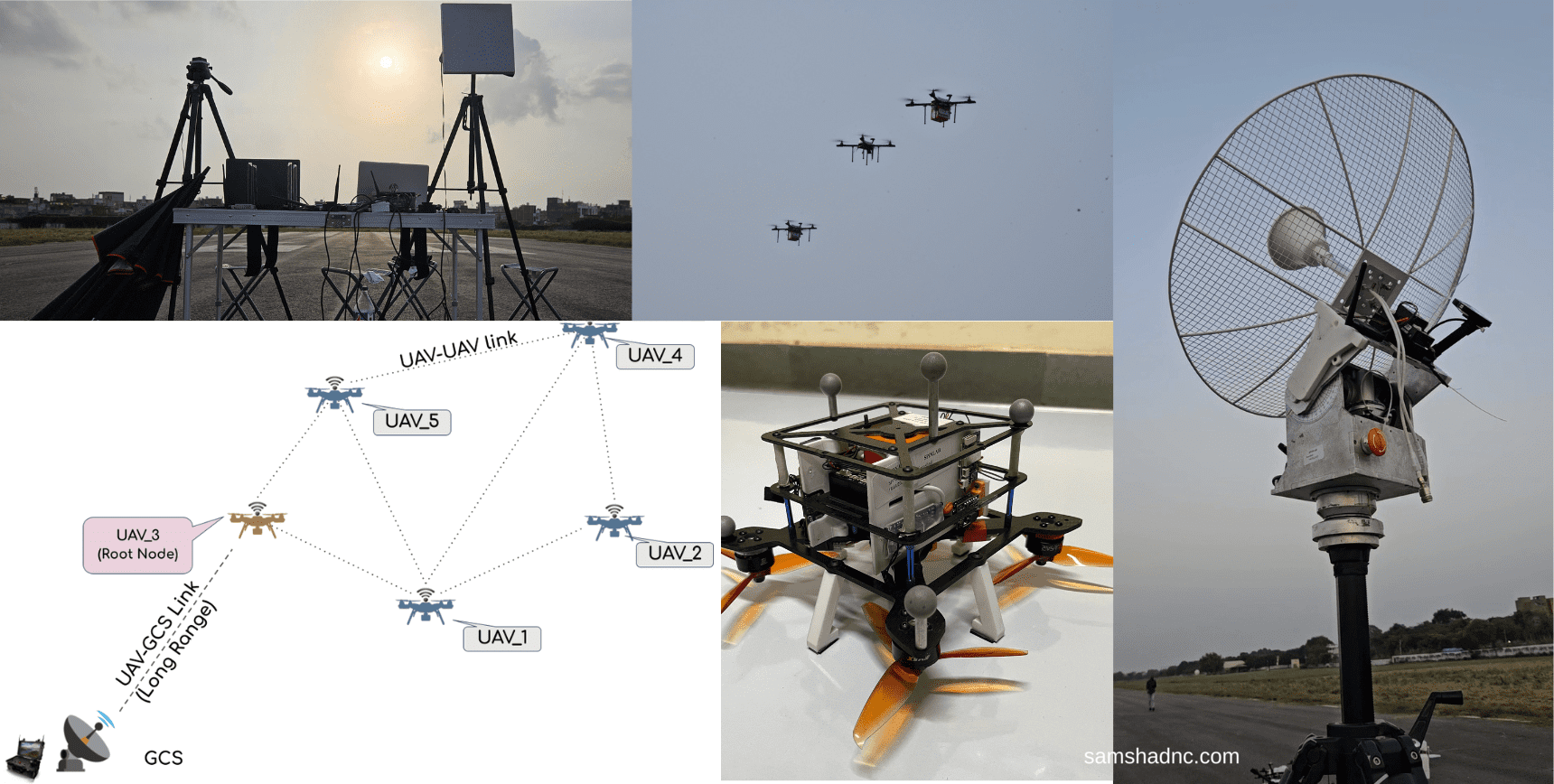
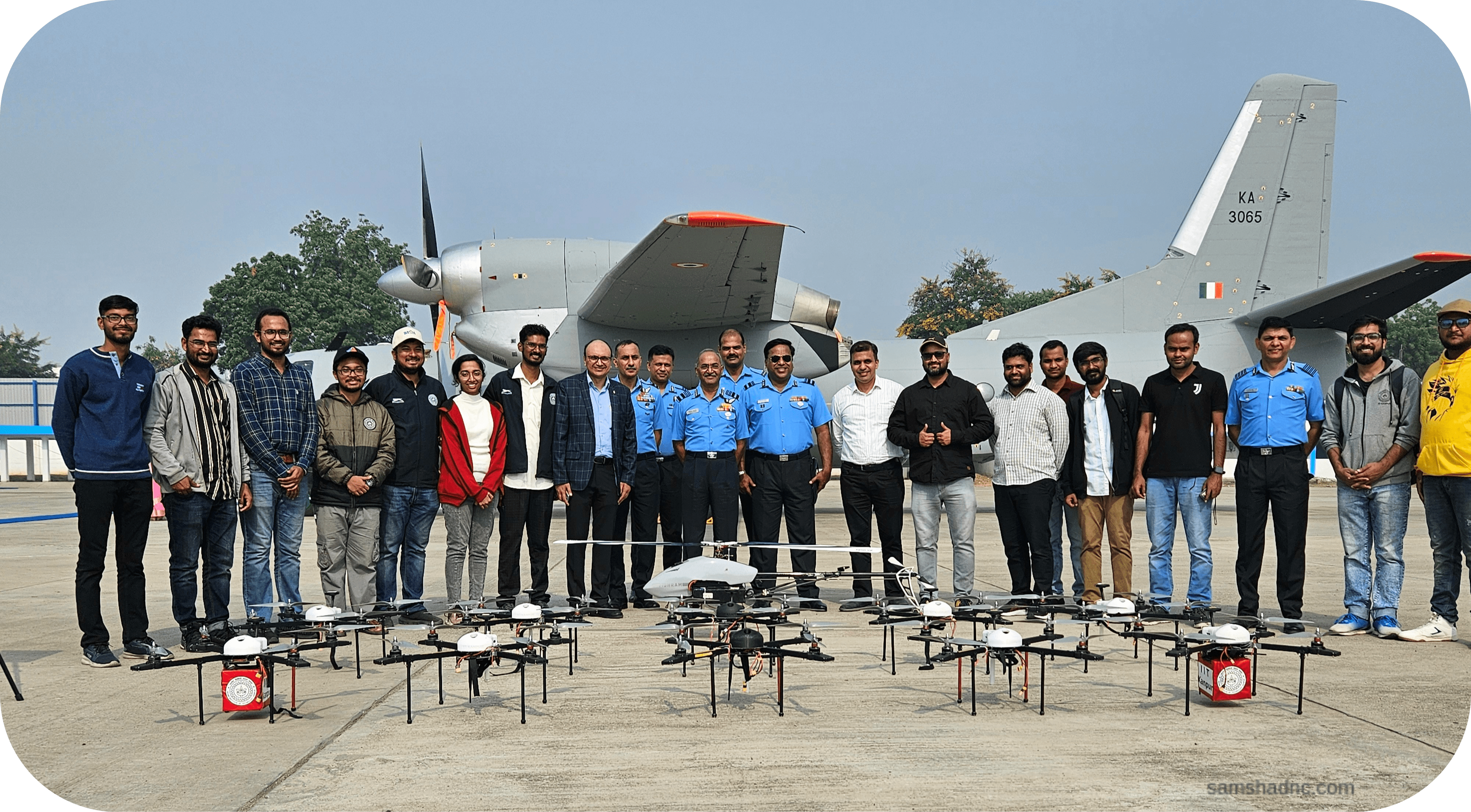
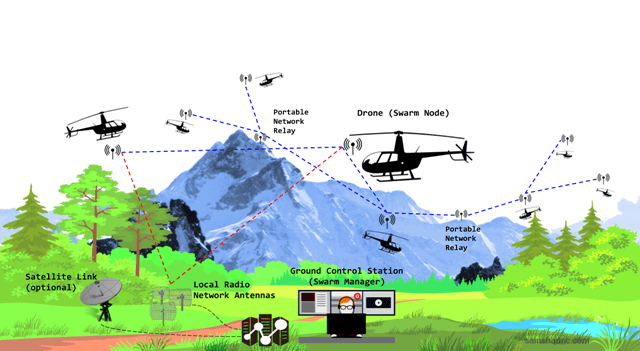
With 8+ years of experience in robotics research, my journey began with UAV development and open-source drone projects, eventually leading the Multi-UAV Research Group at IIT Kanpur, where I worked on multi-robot coordination and system optimization. I now explore Visual Language Models, Semantic 3D Scene Graphs, and multi-robot perception, working toward systems where robots can collectively see and understand the world.
I hold a B.Tech. in Electronics and Communication Engineering from University of Kerala and an MS by Research in Electrical Engineering from IIT Kanpur, where I also trained industry professionals and research students in robotics and autonomous systems.
My expertise spans Computer Vision, Visual SLAM, 3D Scene Graphs, Autonomous Systems, and Multi-Robot Systems..
- Experience
Everything about me!





- Updates
Recent Activities



Publications
- M Samshad and K Rajawat, "Communication and Energy-Aware Multi-UAV Coverage Path Planning for Networked Operations," IEEE Robotics and Automation Letters, 2024. (Under Review), arXiv Preprint.
- S K Roy, M Samshad and K Rajawat, "UNet: A Generic and Reliable Multi-UAV Communication and Networking Architecture for Heterogeneous Applications," IEEE Internet of Things Journal, 2024 (Under Review), arXiv Preprint.
- M Samshad, PP Pradhan, Ketan Rajawat and Mangal Kothari, "CNet: A Reliable Compact Multi-UAV Communication Architecture for Low Bandwidth Connectivity," The American Institute of Aeronautics and Astronautics(AIAA SciTech Forum), 2025. doi: 10.2514/6.2025-2553
- M Samshad and K Rajawat, "SkyNet: The Framework of Decentralized Multi-UAV Operations," Engineers Conclave, Inter IIT Conference, IIT Madras, December 2023.
- M. S. Sruthi, M. J. Poovathingal, V. N. Nandana, S. Lakshmi, M Samshad and V. S. Sudeesh, "YOLOv5 based Open-Source UAV for Human Detection during Search And Rescue (SAR)," 2021 International Conference on Advances in Computing and Communications (ICACC), Kochi, Kakkanad, India, 2021, pp. 1-6, doi: 10.1109/ICACC-202152719.2021.9708269.
- M, Anand & A, Asok & Francis, Athul & Mohan, Karthika & R, Midhun & M Samshad, " Short Range Telemetry Communication for Autonomous Drone Navigation." IEEE-RAICS International Conference on Recent Advances in Intelligent Computational Systems (IEEE RAICS 2020), IEEE Kerala Section.: doi: 10.1109/RAICS51191.2020.9332518.
- Karthik J, Amalu S Panicker, Adarsh Sudarsanan, Sachu Pradeep, M Samshad, Arun C, Praveen Raj, "Air Pollution Detection Using UAV." International Journal of Innovative Research in Technology (IJIRT), June 2021| IJIRT | Volume 8 Issue 1 | ISSN: 2349-6002.


- Testimonial
- Blog
My blog & news

 July 8, 2023
July 8, 2023 July 8, 2023
July 8, 2023 June 30, 2021
June 30, 2021- Nov 27, 2019